
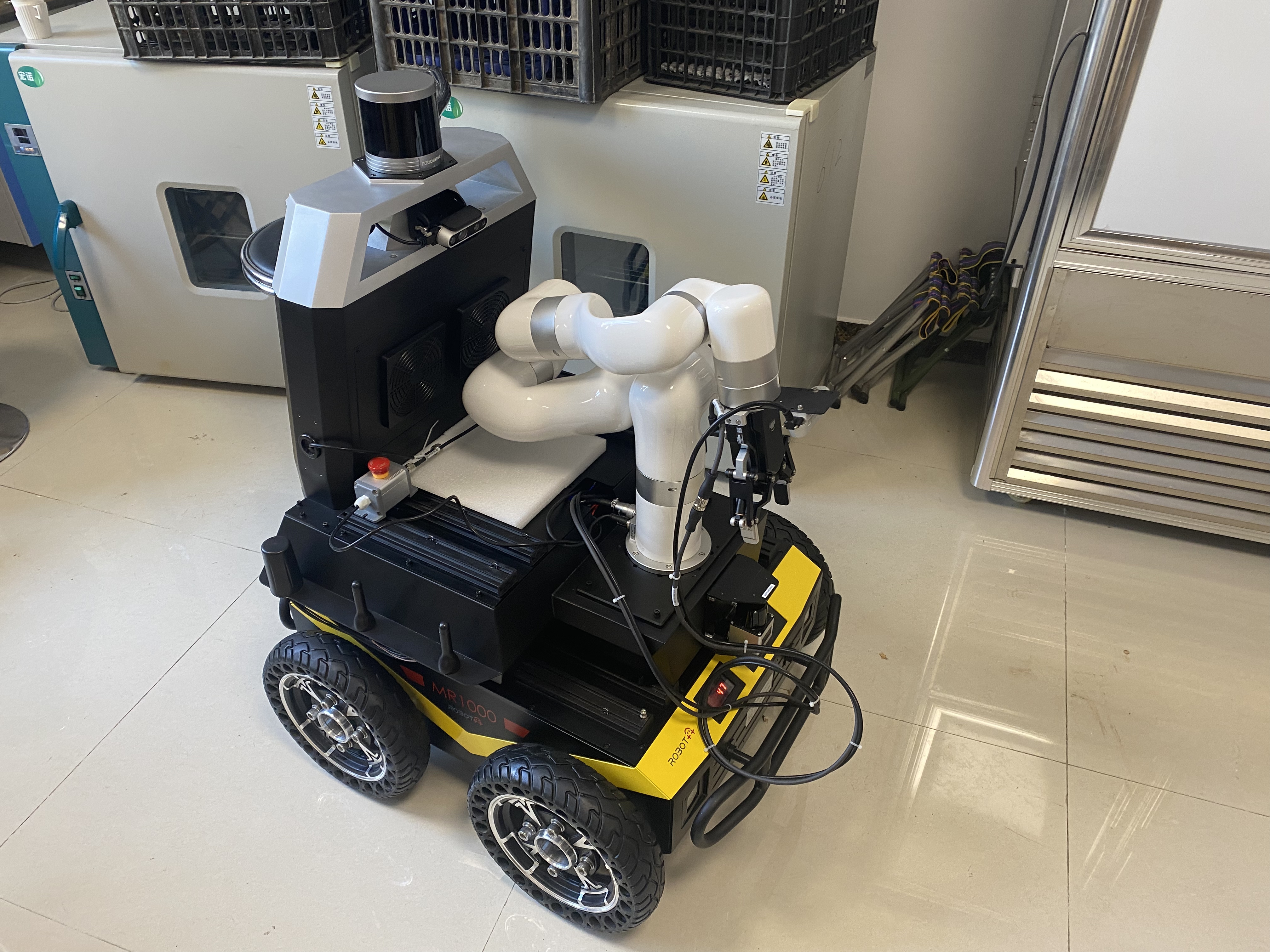
仪器名称:智慧农业采摘机器人开发平台
规格型号:MMX5
分 类:数据采集及工作站
应用领域:农学
所属单位:石家庄市农林科学研究院
产 地:中国
厂 商:深圳史河科技有限公司
价 值:31.48万
购置日期:2024-09-09
使用状态:
共享模式: 外部共享
主要技术指标
一、总体要求:设备由四驱智能移动平台、协作机械臂抓取模块、传感器模块、工控机系统组成,具有任务管理、建图导航、机械臂规划控制、深度学习目标检测、自主抓取、障碍物感知及自动游障功能,平台基于开源ROS,支持二次开发。 二、主要技术指标要求: 1.外形尺寸:长865×宽700×高1056mm 2.离地间隙:≥100mm 3.驱动方式:四轮独立差速驱动 4.电机:≥400Wx4无刷伺服电机 5.移动系统防护等级:车身 ≥IP65 6.碰撞防护:内置传感器的防撞杆 7.最大直线速度:≥1.6m/s 8.最大爬坡角度:≥30° 9.越障高度:≥60mm 10.典型运行时间:≥4小时 11.主控制器:不低于i7-11800H/32GB内存/512GB固态硬盘/RTX3080(16GB)显卡,预装Ubuntu,ROS 12.激光雷达:16线3D 激光雷达,最大测距距离=150m(90m@10%%),精度<士2cm《典型值50%NIST 漫反射板》; 13.3D SLAM: 定行精度<士5cm, 14.夹持器最大行程:85mm; 15.夹持器夹持力: 20N 至235N 范围内可调;最大识别顺率:29FPS 16.RTK 定位精度:平面<1cm士ppm,高程1.5cm+ 1ppmg 17.机械臂自由度:>6个; 18.机械臂最大负载:>5kg; 19.最大识别帧率:≥29FPS(提供辅证截图); 20.识别精确率:97.3%(提供辅证截图); 21.抓取成功率:80%; 22.AI性能(Tensor):≥238TFLOPs; 23.提供模拟苹果采摘Demo源代码及教程 24.能够远程机器人实训平台进行操控,包括:前进、后退和转弯等。可实时显示移动底盘的状态与传感器数据,包括:移动底盘的速度、机器人的GPS信息、实时位姿和IMU数据等。可远程控制机器人导航:加载地图文件,设置初始点与导航点进行自主规划路径导航等。
主要功能/应用范围
农业作物果实采摘、自动导航
服务内容
农业作物果实采摘、自动导航
服务的典型成果
农业作物果实采摘、自动导航
对外开放共享规定
按需共享
参考收费标准
按时收费
| 仪器联系人: | 杨英茹 | 联系电话: | 0311-86812367 |
| 电子邮箱: | 13363883898@163.com | 传 真: |