
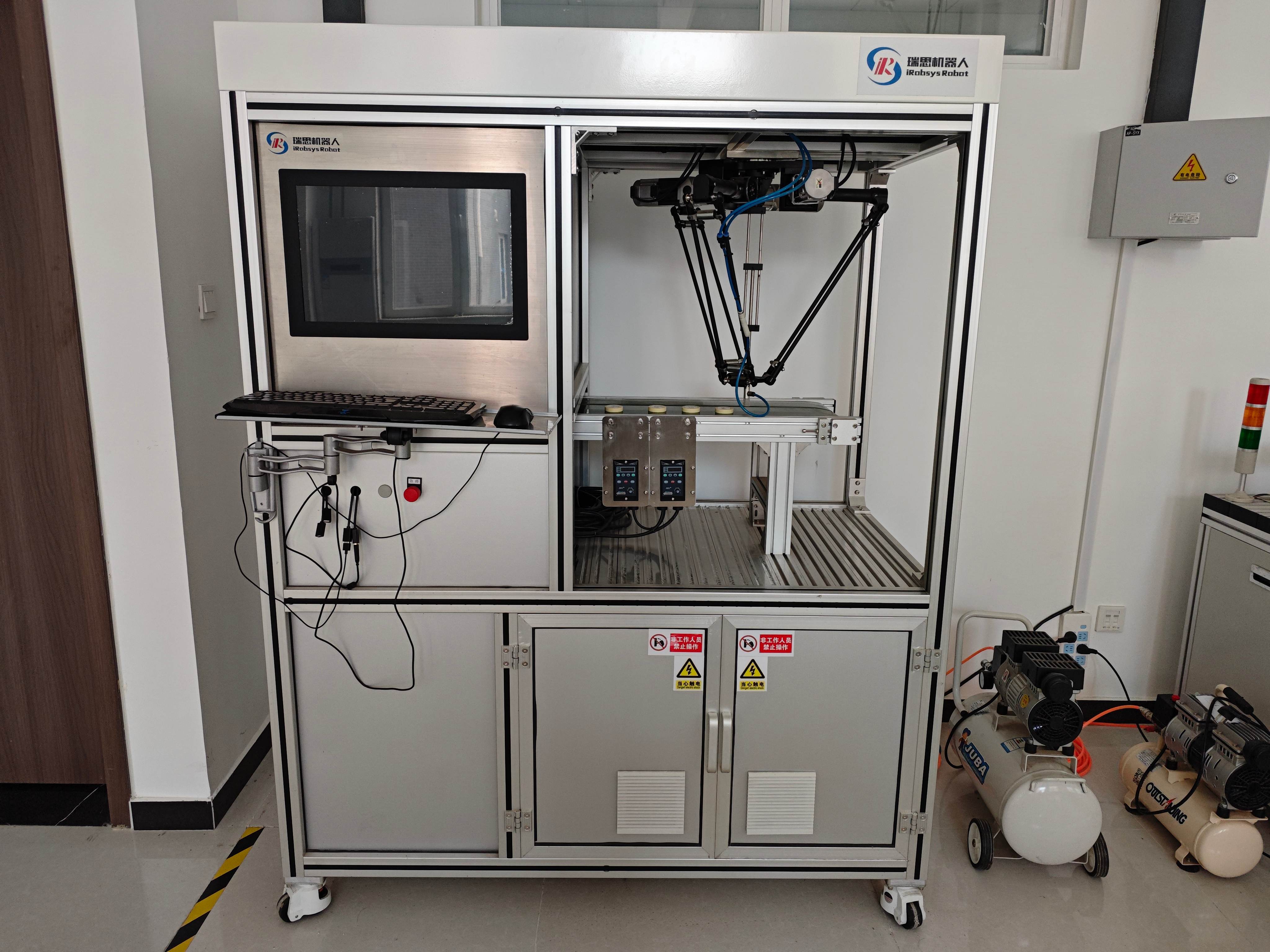
仪器名称:并联机器人视觉分拣系统
规格型号:RSD-500VS
分 类:其他仪器
应用领域:机械工程
所属单位:河北水利电力学院
产 地:中国
厂 商:芜湖瑞思机器人有限公司
价 值:30万
购置日期:2021-12-24
使用状态:
共享模式: 外部共享
主要技术指标
1.并联机器人 (1)自由度:≥4 (2)最大负载:≥1kg (3)重复定位精度:≤±0.1mm 角度重复定位精度:≤±0.5° (4)工作范围直径:≥500mm (5)模块化可拆装结构可实现三种拓扑结构变换 (6)末端执行器:定制吸盘抓具 2.视觉系统 (1)CPU子系统:四核,主频1.44~1.83GHz (2)内存:2G/4G,磁盘32G/64G (3)I/O接口:千兆以太网口、HDMI视频接口、1路光耦隔离触发输入、一路光耦隔离闪光灯输出、一路光耦输入,2路光耦输出、支持RS232x1、USB2.0x2 (4)支持操作系统: 视觉系统软件支持Windows操作系统;硬件支持Windows、Ubuntu16.04 64bit、Linux平台系统 (5)工作温度:环境温度0℃至+50℃正常启动和长期工作,存储温度-30℃至+60℃ (6)有效像素:≥38万像素(分辨率720x540),1/3吋, 像元6.9um (7)电源供电:12~24V DC,最大功率12W 3.机器人工作站 (1)输入电源:单相AC200V~230V(+10%-15%),50Hz (2)工作环境:温度0℃~45℃,相对湿度20%~90%RH(40℃) (3)工作站尺寸:1450mm×700mm×1850mm;偏差不超过±5% (4)输送带数量:≥2,输送带均可调速且独立运行 (5)并联机器人控制系统完全开放、可实现Matlab仿真对接 4.辅助模块 在输送带另一端配装物料导向装置,保证物料机器人循环分拣物料。
主要功能/应用范围
通过视觉系统对物料的位姿进行检测,将信号传送给控制系统,控制系统通过计算分析后指令机器人对物料进行分拣。
服务内容
视觉系统对物料的位姿进行检测,将信号传送给控制系统通过机器人进行物料分拣。
服务的典型成果
无
对外开放共享规定
实验机时的预约接受“电话预约”“邮件申请预约”,请提前一周通过电话或邮件预约机时,提交使用目的、设备型号、使用时间等信息,填写实验室开放申请记录。按参考收费标准进行合理收费。使用设备必须遵守实验室安全规程,接受必要的操作培训,严格按规程操作设备。对因违规操作导致的设备损坏,须承担相应赔偿责任。
参考收费标准
100元/时
| 仪器联系人: | 郗艳梅 | 联系电话: | 0317-7997571 |
| 电子邮箱: | jxgcx@hbwe.edu.cn | 传 真: |